nonlinear systems represent systems whose behavior is not expressible as a sum of the behaviors of its descriptors. In particular, the behavior of nonlinear systems is not subject to the principle of
superposition, as
linear systems are. Crudely, a nonlinear system is one whose behavior is not simply the sum of its parts or their multiples. Linearity of a system allows investigators to make certain mathematical assumptions and approximations, allowing for simple computation of results. In nonlinear systems these assumptions cannot be made. Since nonlinear systems are not equal to the sum of their parts, they are often difficult (or impossible) to model, and their behavior with respect to a given variable (for example, time) is extremely difficult to predict. When modeling non-linear systems, therefore, it is common to approximate them as linear, where possible.
Some nonlinear systems are
exactly solvable or
integrable, while others are known to be
chaotic, and thus have no simple or
closed form solution. A possible example is that of
freak waves. Whilst some nonlinear systems and equations of general interest have been extensively studied, the general theory is poorly understood....
Nonlinear equations and functions are of interest to
physicists and
mathematicians because most physical systems are inherently nonlinear in nature. Physical examples of linear systems are relatively rare. Nonlinear equations are difficult to solve and give rise to interesting phenomena such as
chaos. A linear equation can be described by using a
linear operator. A linear equation in some unknown has the form

. In order to solve any equation, one needs to decide in what mathematical
space the solution u is found. It might be that u is a real number, a vector or perhaps a function with some properties.
The solutions of linear equations can in general be described as a superposition of other solutions of the same equation. This makes linear equations particularly easy to solve.
Nonlinear equations are more complex, and much harder to understand because of their lack of simple superposed solutions. For nonlinear equations the solutions to the equations do not in general form a
vector space and cannot (in general) be
superposed (added together) to produce new solutions.
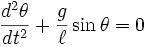
The differential equation of motion of a
simple pendulum is non-linear:
Typically this is linearized by assuming small values of theta so that sin(theta) is approximately zero, so that
For large values of θ, or if the non-linear behavior of the pendulum is of interest, the non-linear equation may be analyzed by
phase plane methods, or else through the use of
elliptic integrals.
Examples of nonlinear equations




 I've been found out
I've been found out

 First prize in the Shooting Right Past The Point Contest goes to the 'bert!
First prize in the Shooting Right Past The Point Contest goes to the 'bert! is just as valid for this one...
is just as valid for this one...